مقدمه ای بر سیستم های کنترل: کار، انواع و کاربردها
هر زمان که یک ماشین مقداری مانند دما، سرعت یا سطح را به طور خودکار ثابت نگه می دارد، از سیستم های کنترل استفاده می کنید.این مقاله توضیح می دهد که یک سیستم کنترل چیست، چگونه قطعات آن با هم کار می کنند و چگونه بازخورد خروجی را صحیح نگه می دارد.همچنین انواع اصلی سیستم ها و نحوه عملکرد آنها را مشاهده خواهید کرد.استفادهها، مزایا و محدودیتهای رایج گنجانده شده است.کاتالوگ
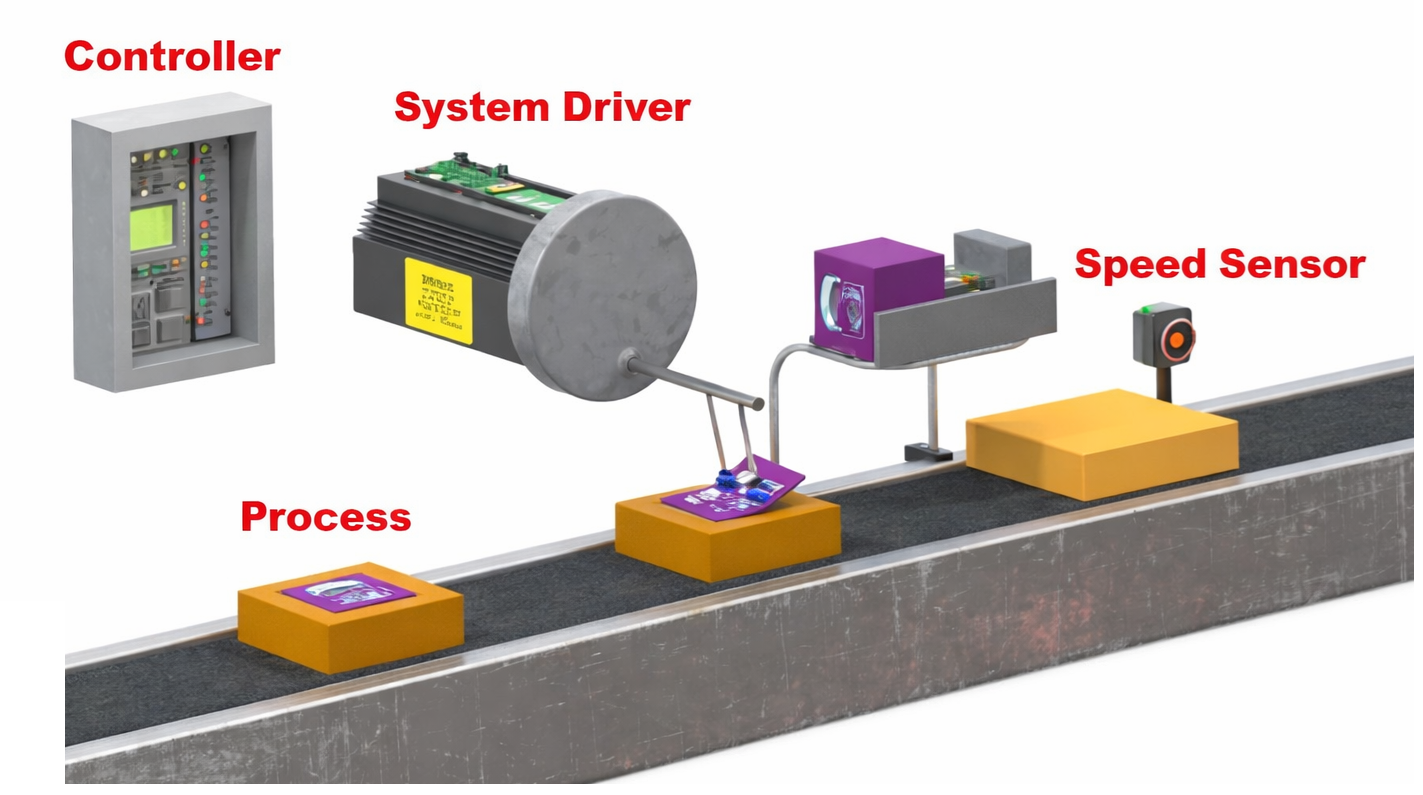
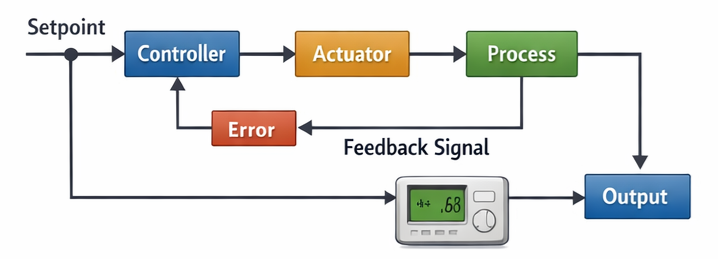
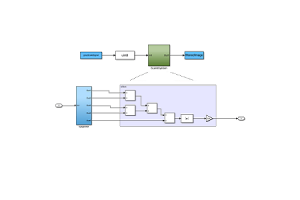
شکل 1. نمونه سیستم کنترل
سیستم کنترل چیست؟
سیستم کنترل سیستمی است که مقدار اندازه گیری شده را نزدیک به مقدار مورد نظر نگه می دارد.هدف آن تنظیم خودکار یک فرآیند است تا خروجی درست بماند حتی در صورت تغییر شرایط.به عنوان مثال، یک ترموستات اتاقی دما را نزدیک به سطح تنظیم شده نگه می دارد و یک کروز کنترل خودرو، وسیله نقلیه را در سرعت انتخابی نگه می دارد.یک کنترل کننده سطح مخزن آب نیز ارتفاع آب را در یک علامت انتخاب شده حفظ می کند.به عبارت ساده، یک سیستم کنترلی به طور مداوم یک متغیر را برای مطابقت با مقدار مورد نیاز بررسی و تصحیح می کند.
عناصر اساسی یک سیستم کنترل
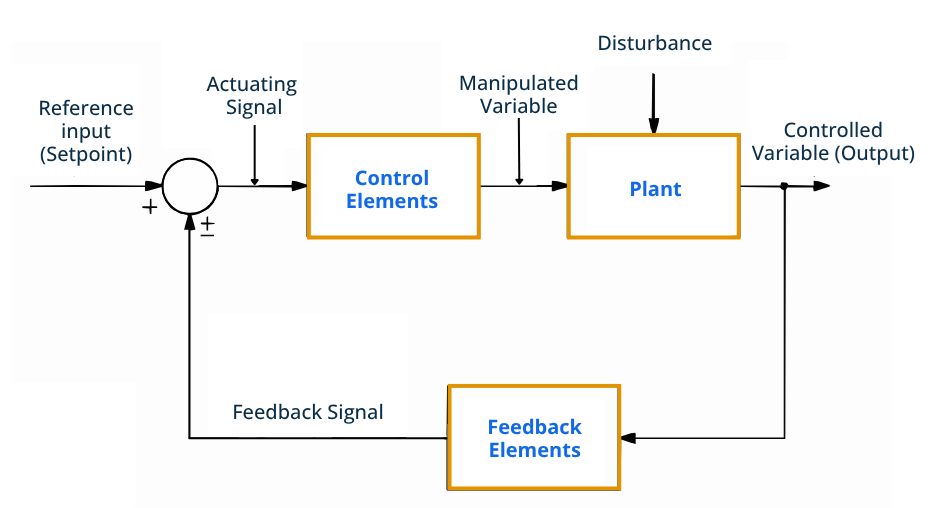
شکل 2. نمودار بلوک سیستم کنترل
یک سیستم کنترل از چندین بخش استاندارد ساخته شده است که هر کدام وظیفه خاصی را انجام می دهند.
• ورودی مرجع (نقطه تنظیم)
این مقدار مورد نظری است که سیستم سعی در حفظ آن دارد.شرایط هدف انتخاب شده را نشان می دهد.سیستم همیشه مقدار واقعی را با این مرجع مقایسه می کند.
• سیگنال فعال
این سیگنالی است که پس از مقایسه مقادیر مورد نظر و واقعی تولید می شود.این نشان دهنده میزان تنظیم مورد نیاز است.سیگنال سیستم را برای اصلاح آماده می کند.
• عناصر کنترل
این بخش ها فرآیند تصمیم گیری را کنترل می کنند.آنها اقدام اصلاحی را بر اساس سیگنال دریافتی تعیین می کنند.خروجی از این مرحله فرآیند را برای تنظیم آماده می کند.
• متغیر دستکاری شده
این مقدار قابل تنظیمی است که به سمت فرآیند ارسال می شود.تغییر این مقدار بر خروجی نهایی تأثیر می گذارد.این متغیری است که سیستم می تواند مستقیماً تغییر کند.
• گیاه
کارخانه فرآیندی است که کنترل می شود.مقدار خروجی نهایی را تولید می کند.هدف این سیستم حفظ این خروجی در سطح مطلوب است.
• اختلال
این یک تغییر ناخواسته است که بر روند تأثیر می گذارد.می تواند خروجی را از مقدار مورد نظر دور کند.سیستم باید آن را جبران کند.
• متغیر کنترل شده (خروجی)
این نتیجه اندازه گیری واقعی فرآیند است.وضعیت فعلی سیستم را نشان می دهد.هدف این است که آن را برابر با ورودی مرجع نگه دارید.
• عناصر بازخورد
اینها خروجی را اندازه می گیرند و اطلاعات را برای بررسی ارسال می کنند.آنها شرایط فعلی را برای سیستم فراهم می کنند.این اجازه می دهد تا تصحیح تعیین شود.
• سیگنال بازخورد
این اطلاعات بازگشتی در مورد مقدار خروجی است.نشان دهنده شرایط فرآیند است.سیستم از آن برای مقایسه استفاده می کند.
اصل کار سیستم کنترل
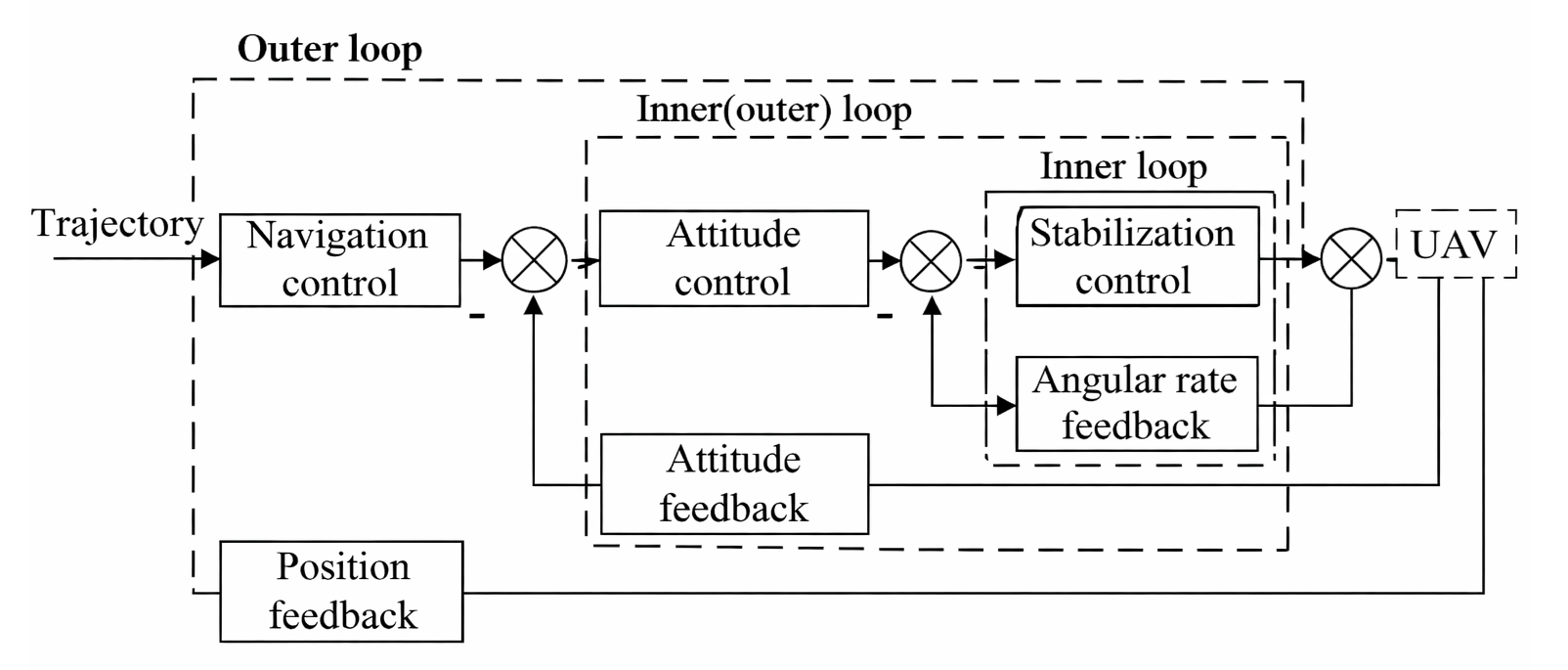
شکل 3. اصل کار سیستم کنترل
اصل کار یک سیستم کنترل با دادن مقدار ورودی دلخواه به سیستم آغاز می شود.سپس سیستم این مقدار را با مقدار خروجی واقعی مقایسه می کند.تفاوت بین آنها سیگنال خطا نامیده می شود.اگر خطا وجود داشته باشد، سیستم یک سیگنال تصحیح تولید می کند.این تصحیح فرآیند را برای کاهش خطا تنظیم می کند.خروجی تغییر می کند و دوباره به طور مداوم بررسی می شود.چرخه تکرار می شود تا زمانی که خروجی با مقدار مورد نظر مطابقت داشته باشد.
ویژگی های سیستم های کنترل
سیستم های کنترل بر اساس میزان عملکرد آنها در طول عملیات ارزیابی می شوند.این ویژگی ها کیفیت و قابلیت اطمینان پاسخ سیستم را توصیف می کند.
|
خصوصیات |
توضیحات |
|
ثبات |
خروجی انجام می دهد
عدم واگرایی؛پس از اختلال به مقدار ثابت برمی گردد |
|
دقت |
خطای نهایی ≤
± 2-5٪ از مقدار تنظیم شده |
|
دقت |
خروجی
تغییرات ≤ ± 1٪ در همان ورودی |
|
زمان پاسخگویی
|
اولیه
واکنش در زمان تاخیر اندازه گیری شده (td) رخ می دهد |
|
زمان ظهور |
زمان از 10%
تا 90 درصد ارزش نهایی |
|
زمان تسویه |
وارد می شود و
در باند 2±% باقی می ماند |
|
بیش از حد |
اوج بیش از
مقدار نهایی بر اساس درصد مقدار |
|
حالت ثابت
خطا |
ثابت
افست باقی مانده پس از تثبیت |
|
حساسیت |
Δ خروجی /
Δ نسبت تغییر پارامتر |
|
استحکام |
حفظ می کند
عملکرد با وجود تغییر اختلال |
|
پهنای باند |
عمل می کند
به طور موثر تا فرکانس قطع -3 دسی بل |
|
تکرارپذیری |
همان ورودی
خروجی مشابهی را در محدوده تحمل تولید می کند |
|
قابلیت اطمینان |
عمل می کند
بدون شکست برای زمان عملیاتی نامی (MTBF) |
|
میرایی |
نوسان
پوسیدگی با نسبت میرایی ζ تعیین می شود |
|
سرعت از
پاسخ |
کل زمان به
به شرایط پایدار برسد |
انواع سیستم های کنترل
سیستم های کنترل بر اساس نحوه مدیریت اطلاعات، سیگنال ها و رفتار پاسخ طبقه بندی می شوند.آنها بر اساس استفاده از بازخورد، شکل سیگنال و رفتار ریاضی گروه بندی می شوند.
سیستم کنترل حلقه باز
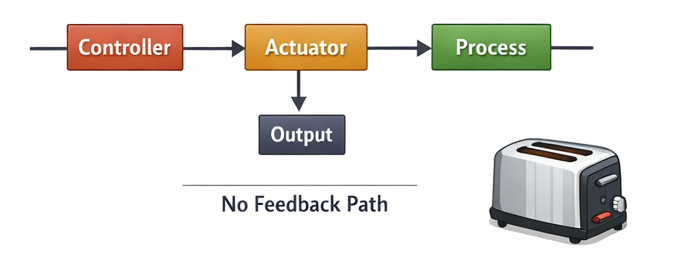
شکل 4. نمودار سیستم کنترل حلقه باز
یک سیستم کنترل حلقه باز سیستمی است که در آن خروجی بر عملکرد کنترل تأثیر نمی گذارد.سیستم دستوری را ارسال می کند و بدون بررسی آن نتیجه را صحیح فرض می کند.از آنجا که هیچ مسیر بازخوردی وجود ندارد، نمی تواند به طور خودکار خطاها یا اختلالات را تصحیح کند.عملکرد عمدتاً به کالیبراسیون مناسب و شرایط عملیاتی بستگی دارد.این سیستم ها ساده، کم هزینه و طراحی آسان هستند.با این حال، تغییرات در بار یا محیط می تواند نتیجه نهایی را تحت تاثیر قرار دهد.نمونه های رایج عبارتند از: تایمر توستر برقی، کنترل تایمر ماشین لباسشویی و تایمر آبیاری ثابت.
سیستم کنترل حلقه بسته
شکل 5. نمودار سیستم کنترل حلقه بسته
سیستم کنترل حلقه بسته سیستمی است که از بازخورد برای تنظیم خودکار خروجی خود استفاده می کند.سیستم نتیجه را اندازه گیری کرده و آن را با مقدار مورد نظر مقایسه می کند.اگر تفاوت ظاهر شد، یک تصحیح برای کاهش خطا اعمال می شود.این تنظیم مداوم امکان عملکرد دقیق و پایدار را حتی در شرایطی که شرایط متفاوت است را فراهم می کند.سیستم های حلقه بسته دقت و قابلیت اطمینان بیشتری نسبت به سیستم های حلقه باز ارائه می دهند.آنها به طور گسترده در برنامه های کاربردی کنترل خودکار مدرن استفاده می شوند.نمونه های معمولی عبارتند از کنترل دمای کولر، کروز کنترل خودرو و تنظیم کننده های ولتاژ خودکار.
سیستم کنترل زمان پیوسته
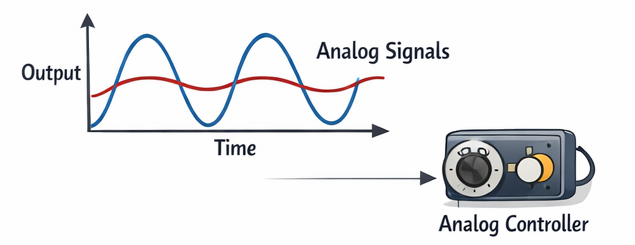
شکل 6. سیگنال کنترل زمان پیوسته (آنالوگ).
یک سیستم کنترل زمان پیوسته سیگنال هایی را پردازش می کند که در طول زمان به آرامی تغییر می کنند.ورودی و خروجی در هر لحظه بدون وقفه وجود دارد.این سیستم ها معمولاً با سیگنال های الکتریکی یا مکانیکی آنالوگ کار می کنند.از آنجایی که سیگنال ها پیوسته هستند، پاسخ نیز صاف و طبیعی است.سیستمهای زمان پیوسته معمولاً در کنترلکنندههای آنالوگ سنتی یافت میشوند.آنها برای فرآیندهای فیزیکی که نیاز به واکنش فوری دارند مناسب هستند.به عنوان مثال می توان به تنظیم کننده های سرعت آنالوگ، کنترل حجم صدا تقویت کننده صوتی و کنترل موقعیت سوپاپ هیدرولیک اشاره کرد.
سیستم کنترل زمان گسسته
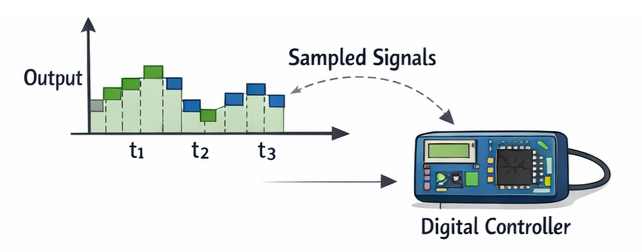
شکل 7. سیگنال کنترل زمان گسسته (دیجیتال).
یک سیستم کنترل زمان گسسته با استفاده از سیگنال های داده نمونه کار می کند.سیستم فقط در بازه های زمانی مشخص مقادیر را بررسی و به روز می کند.این سیگنال ها معمولاً توسط کنترلرهای دیجیتال یا ریزپردازنده ها پردازش می شوند.خروجی گام به گام به جای پیوسته تغییر می کند.چنین سیستم هایی اجازه عملکرد قابل برنامه ریزی و تنظیم انعطاف پذیر را می دهند.آنها به طور گسترده در کنترل الکترونیکی و رایانه ای مدرن استفاده می شوند.به عنوان مثال می توان به کنترل دمای مبتنی بر میکروکنترلر، کنترل دیجیتال سرعت موتور و ترموستات خانه هوشمند اشاره کرد.
سیستم کنترل خطی

شکل 8. رابطه ورودی-خروجی سیستم خطی
یک سیستم کنترل خطی از یک رابطه متناسب بین ورودی و خروجی پیروی می کند.اگر ورودی دو برابر شود، خروجی نیز در شرایط مشابه دو برابر می شود.این سیستم ها اصل برهم نهی را برآورده می کنند که در آن ورودی های ترکیبی خروجی های ترکیبی تولید می کنند.رفتار خطی امکان تجزیه و تحلیل ریاضی قابل پیش بینی و آسان را فراهم می کند.اکثر طرح های کنترل نظری برای سادگی، عملیات خطی را فرض می کنند.مدل های خطی به طراحی سیستم های پایدار و دقیق کمک می کنند.به عنوان مثال می توان به تقویت کننده های الکترونیکی سیگنال کوچک و مناطق کنترل موتور کم بار اشاره کرد.
سیستم کنترل غیر خطی
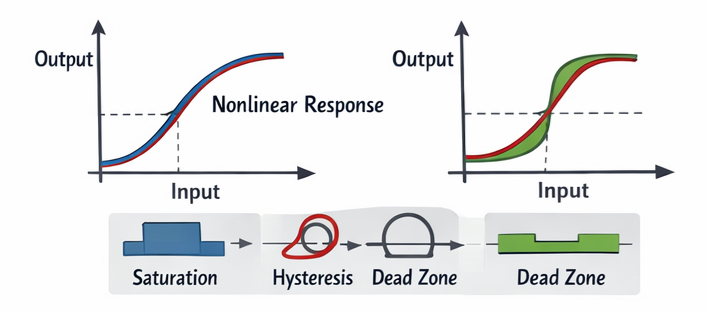
شکل 9. ویژگی های پاسخ غیرخطی سیستم
یک سیستم کنترل غیرخطی خروجی دارد که با ورودی متناسب نیست.پاسخ بسته به محدوده عملیاتی یا شرایط تغییر می کند.تغییرات کوچک ورودی ممکن است تغییرات زیادی در خروجی ایجاد کند یا اصلاً تغییری نداشته باشد.اثراتی مانند اشباع، هیسترزیس و مناطق مرده اغلب ظاهر می شوند.تحلیل این سیستمها سختتر است، اما فرآیندهای فیزیکی را با دقت بیشتری نشان میدهند.بسیاری از سیستم ها به طور طبیعی به صورت غیر خطی رفتار می کنند.به عنوان مثال می توان به محدودیت های حرکت بازوی رباتیک، رفتار محرک مغناطیسی و کنترل جریان شیر در موقعیت های شدید اشاره کرد.
مزایا و معایب سیستم های کنترلی
سیستم های کنترل ثبات را بهبود می بخشد و تلاش دستی را کاهش می دهد، اما پیچیدگی و هزینه را نیز معرفی می کند.
مزایای سیستم های کنترل
• سیستم در حین کار خروجی را نزدیک به مقدار مورد نیاز نگه می دارد.
• اپراتورها نیازی به تنظیم مداوم تجهیزات با دست ندارند.
• ماشین ها می توانند ساعت های طولانی بدون توقف مکرر کار کنند.
• سیستم تغییرات شرایط را به طور خودکار تصحیح می کند.
• وضعیت عملکرد را می توان از یک پنل یا نمایشگر از راه دور بررسی کرد.
معایب سیستم های کنترل
• هزینه راه اندازی بیشتر از سیستم های دستی ساده است.
• برای راه اندازی و خدمات به کارگران ماهر نیاز است.
• حسگرها و قطعات الکترونیکی ممکن است در طول زمان از کار بیفتند.
• یافتن علت مشکلات ممکن است بیشتر طول بکشد.
• سیستم به توان الکتریکی پایدار بستگی دارد.
کاربردهای سیستم های کنترل
سیستم های کنترل هم در اتوماسیون صنعتی و هم در تجهیزات روزمره برای حفظ عملکرد صحیح به طور خودکار استفاده می شوند.
1. تولید صنعتی
ماشین های تولیدی ابعاد و کیفیت محصول را ثابت نگه می دارند.خطوط مونتاژ خودکار از مقررات برای اطمینان از تکرارپذیری استفاده می کنند.این باعث کاهش ضایعات و بهبود کارایی می شود.
2. تنظیم دما
تجهیزات گرمایش و سرمایش شرایط محیطی راحت را حفظ می کنند.ساختمان ها برای تثبیت آب و هوای داخلی به تنظیم خودکار متکی هستند.این باعث بهبود بهره وری انرژی و راحتی می شود.
3. سیستم های حمل و نقل
خودروها از کنترل سرعت و پایداری برای عملکرد نرمتر استفاده میکنند.خودروهای مدرن شامل سیستم های کروز کنترل و کشش هستند.اینها ایمنی و عملکرد رانندگی را بهبود می بخشد.
4. سیستم های قدرت
شبکه های الکتریکی سطوح ولتاژ و فرکانس را تنظیم می کنند.ژنراتورها خروجی را مطابق با تقاضای بار تنظیم می کنند.این امر تامین برق پایدار را تضمین می کند.
5. رباتیک و اتوماسیون
ربات ها وظایف موقعیت یابی و حرکتی دقیق را انجام می دهند.ماشین های خودکار به طور مداوم با دقت بالا کار می کنند.این امکان تولید پیشرفته را فراهم می کند.
6. تجهیزات پزشکی
دستگاه ها شرایط عملیاتی کنترل شده را در طول درمان حفظ می کنند.تجهیزات مانیتورینگ مقادیر را در محدوده ایمن نگه می دارد.این امر ایمنی و قابلیت اطمینان بیمار را بهبود می بخشد.
7. لوازم خانگی
دستگاه های روزمره به طور خودکار تنظیمات عملیات را مدیریت می کنند.ماشینهای لباسشویی و یخچالها شرایط عملکرد مناسب را حفظ میکنند.این کار کارهای روزانه را ساده می کند.
8. سیستم های هوافضا
هواپیماها و پهپادها شرایط پرواز را پایدار نگه می دارند.هدایت خودکار جهت گیری و ارتفاع صحیح را حفظ می کند.این از ناوبری قابل اعتماد پشتیبانی می کند.
سیستم کنترل در مقابل اتوماسیون در مقابل سیستم های جاسازی شده
این فناوریها ارتباط نزدیکی با هم دارند اما اهداف مهندسی متفاوتی را در محصولات الکترونیکی و صنعتی مدرن انجام میدهند.
|
ویژگی |
کنترل کنید
سیستم |
اتوماسیون |
تعبیه شده است
سیستم |
|
تمرکز اصلی |
مقررات از
متغیرها |
فرآیند
اعدام |
دستگاه
عملیات |
|
هدف |
حفظ کنید
مقدار مورد نظر |
انجام وظایف
به صورت خودکار |
اختصاصی اجرا کنید
توابع |
|
دامنه |
خاص
رفتار فرآیند |
کل
گردش کار
|
مجرد
دستگاه محصول |
|
تصمیم
قابلیت |
بر اساس
مقادیر اندازه گیری شده |
بر اساس
منطق برنامه ریزی شده |
بر اساس
سیستم عامل |
|
استفاده از بازخورد |
اغلب
مورد نیاز است |
اختیاری |
اختیاری |
|
نوع سخت افزار |
سنسورها و
محرک ها |
ماشین آلات و
کنترل کننده ها |
میکروکنترلر
هیئت مدیره |
|
نقش نرم افزاری |
محاسبه
و اصلاح |
توالی یابی
و هماهنگی |
دستگاه
منطق کنترل |
|
نوع پاسخ |
مستمر
تنظیم |
وظیفه
اعدام |
عملیات عملکردی |
|
اندازه سیستم |
کوچک به
متوسط |
متوسط به
بزرگ |
خیلی کوچک |
|
انعطاف پذیری |
متوسط |
بالا |
محدود |
|
زمان
مورد نیاز |
بالا |
متوسط |
بالا |
|
کاربرد
سطح |
سطح فرآیند |
سطح گیاه |
سطح محصول |
|
مثال |
دما
کنترل کنید |
کارخانه
خط تولید |
ساعت هوشمند |
|
یکپارچه سازی |
بخشی از
اتوماسیون |
حاوی
سیستم های کنترل |
از هر دو پشتیبانی می کند |
نتیجه گیری
سیستم های کنترل با مقایسه مداوم خروجی واقعی با مقدار هدف و تصحیح هر گونه خطا، ثبات را حفظ می کنند.عملکرد آنها به عناصر اصلی مانند بازخورد، عملکرد کنترل کننده و فرآیند کنترل شده بستگی دارد.طبقهبندیهای مختلف نحوه مدیریت سیگنالها و نحوه پاسخ دقیق یک سیستم به اختلالات را تعریف میکنند.به دلیل این قابلیت ها، سیستم های کنترل به طور گسترده ای در صنعت، حمل و نقل، انرژی، تجهیزات پزشکی و تجهیزات روزمره استفاده می شود.
دربارهی ما
ALLELCO LIMITED
ادامه مطلب
پرس و جو سریع
لطفاً یک سؤال ارسال کنید ، ما بلافاصله پاسخ خواهیم داد.
سوالات متداول [FAQ]
1. تفاوت بین کنترلر و سیستم کنترل چیست؟
یک کنترل کننده تنها وسیله تصمیم گیری است (مانند کنترل کننده PLC یا PID).یک سیستم کنترل شامل کنترل کننده به علاوه حسگرها، محرک ها و فرآیند در حال تنظیم است.
2. کنترل PID چیست و چرا اهمیت دارد؟
کنترل PID از اقدامات متناسب، انتگرال و مشتق برای به حداقل رساندن سریع و روان خطا استفاده می کند.پایداری، دقت و سرعت پاسخگویی را در اکثر سیستم های صنعتی بهبود می بخشد.
3. چرا سیستم های کنترلی گاهی اوقات نوسان می کنند یا شکار می کنند؟
نوسان زمانی رخ می دهد که اصلاحات بیش از حد تهاجمی یا تاخیری باشد.تنظیم ضعیف، سنسورهای کند، یا افزایش بیش از حد باعث می شود که خروجی به طور مکرر بیش از حد افزایش یابد.
4. اشباع محرک چیست؟
اشباع محرک زمانی اتفاق می افتد که محرک به حد فیزیکی خود برسد و نتواند خروجی را بیشتر افزایش دهد.این امر از تصحیح خطاهای بزرگ توسط سیستم جلوگیری می کند.
5. سیستم های کنترل چگونه تاخیر در فرآیندها را مدیریت می کنند؟
آنها از روش های تنظیم، فیلترها یا الگوریتم های پیش بینی برای جبران تاخیر استفاده می کنند تا اصلاح در زمان مناسب انجام شود.

راهنمای مقاومت 4.7 kΩ: کد رنگ، موارد استفاده، آزمایش و مقایسه ارزش
در 2026/02/16

مدار شکن مینیاتوری (MCB): اصل کار، انواع، رتبه بندی و راهنمای انتخاب
در 2026/02/15
پست های محبوب
-

رایانه های مجموعه دستورالعمل پیچیده: چگونه آنها محاسبات را تغییر دادند؟
در 8000/04/18 147760
-

pinout uSB-C و ویژگی های
در 2000/04/18 111969
-
با استفاده از Xilinx Simulation Simulation Primitives: یک راهنمای جامع برای طراحی و شبیه سازی FPGA
در 1600/04/18 111351
-
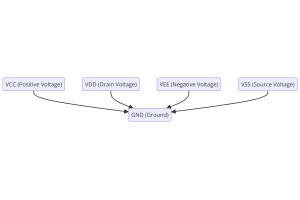
ولتاژ منبع تغذیه در الکترونیک: معنی VCC، VDD، VEE، VSS و GND
در 0400/04/18 83734
-

راهنمای اتصال RJ45: Pinout ، سیم کشی ، انواع کابل و موارد استفاده
در 1970/01/1 79525
-
راهنمای نهایی برای کدهای رنگ سیم در سیستم های برقی مدرن
روشی که سیستم های برقی ما از رنگ ها استفاده می کنند فقط به نظر نمی رسد.در حال حاضر هر رنگ سیم یک عملکرد خاص را نشان می دهد ، و در هنگام نصب و نگهداری ، شناسایی و کنترل صحیح اجزای الکتریکی را آسان ت...در 1970/01/1 66932
-

راهنمای دریچه Purge: عملکرد ، علائم ، آزمایش و جایگزینی برای عملکرد بهینه موتور
دریچه پاکسازی بخش مهمی از سیستم خودرو است که به تمیز نگه داشتن هوا با مدیریت بخارات سوخت قبل از فرار به جو کمک می کند.این نه تنها با کاهش آلودگی به محیط زیست کمک می کند بلکه باعث می شود ماشین بهتر ...در 1970/01/1 63084
-
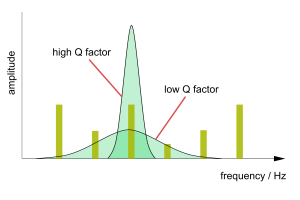
کیفیت (س) فاکتور: معادلات و برنامه ها
ضریب کیفیت یا "Q" هنگام بررسی چگونگی کار سلف و طنین انداز در سیستم های الکترونیکی که از فرکانس های رادیویی استفاده می کنند (RF) مهم است."Q" اندازه گیری می کند که چگونه یک مدار از دست دادن انرژی به ...در 1970/01/1 63025
-
دستیابی به عملکرد اوج با حداکثر قضیه انتقال قدرت
حداکثر قضیه انتقال نیرو توضیح می دهد که چگونه انرژی از یک منبع ، مانند باتری یا ژنراتور ، به یک بار متصل می رود.این وضعیت دقیق را نشان می دهد که بار بیشترین قدرت را دریافت می کند.این مقاله شامل آنچ...در 1970/01/1 54090
-

مشخصات باتری A23 و سازگاری
باتری A23 یک باتری کوچک و استوانه ای با ولتاژ بالا است.همچنین به آن 23A ، 23AE یا MN21 گفته می شود ، با 12 ولت و بسیار بالاتر از باتری های AA یا AAA اجرا می شود.طراحی ویژه آن باعث می شود ت...در 1970/01/1 52163
شماره قسمت داغ
-

AOT2500L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 150V 11.5/152A TO220
DS80C320-QCG+
Analog Devices Inc./Maxim Integrated
IC MCU 8BIT ROMLESS 44PLCC
DF30FB-40DS-0.4V(81)
Hirose Electric Co Ltd
CONN RCPT 40POS SMD GOLD
A1322LUA-T
Allegro MicroSystems
SENSOR HALL EFFECT ANALOG 3SIP
767163392GPTR13
CTS Resistor Products
RES ARRAY 8 RES 3.9K OHM 16SOIC
LV8404T-TLM-E
onsemi
IC MOTOR DRIVER
PIC18F2321-E/SS
Microchip Technology
IC MCU 8BIT 8KB FLASH 28SSOP
ABMM2-7.3728MHZ-E2-T
Abracon Corporation
CRYSTAL 7.3728MHZ 18PF SMD
SK36SMA
Diotec Semiconductor
SCHOTTKY SMA 60V 3A
BR93L56FV-WE2
Rohm Semiconductor
IC EEPROM 2KBIT SPI 2MHZ 8SSOPB
TMP36GSZ-REEL7
Analog Devices Inc.
SENSOR ANALOG -40C-125C 8SOIC
MAX6350MJA
Analog Devices Inc./Maxim Integrated
IC VREF SERIES 0.02% 8CERDIP
FDP15N40
onsemi
MOSFET N-CH 400V 15A TO220-3
LM340K-5.0
Texas Instruments
IC REG LINEAR 5V 1.5A TO3-2
MOC3162TM
Fairchild Semiconductor
TRIAC OUTPUT OPTOCOUPLER
ATH10K12-9SJL
Artesyn Embedded Power
DC DC CONVERTER 1.2-5.5V 55W
AD7684BRMZRL7
Analog Devices Inc.
IC ADC 16BIT SAR 8MSOP
350561-1
TE Connectivity AMP Connectors
CONN PIN 18-24AWG CRIMP TIN -

2N3054
Microchip Technology
POWER BJT
AD7863ARZ-10
Analog Devices Inc.
IC ADC 14BIT SAR 28SOIC
TPS38B752933DSKR
Texas Instruments
65-V DUAL-CHANNEL SUPERVISOR WIT
MT8889CS1
Microchip Technology
IC TELECOM INTERFACE 20SOIC
SIP2800DY-T1-E3
Vishay Siliconix
IC REG CTRLR MULT TOPOLOGY 8SOIC
0451.125MR
Littelfuse Inc.
FUSE BOARD MNT 125MA 125VAC/VDC
NCV20091SN2T1G
onsemi
IC OPAMP GP 1 CIRCUIT 5TSOP
PIC16LF876-04/SO
Microchip Technology
IC MCU 8BIT 14KB FLASH 28SOIC
08053C153JAT2A
KYOCERA AVX
CAP CER 0.015UF 25V X7R 0805
ST72F621L4M1
STMicroelectronics
IC MCU 8BIT 16KB FLASH 34SOIC
IRGP50B60PDPBF
International Rectifier
AUTOMOTIVE WARP2 IGBT ULTRAFAST
RT1206BRE07300KL
YAGEO
RES SMD 300K OHM 0.1% 1/4W 1206
ISL6560CB
Renesas Electronics America Inc
IC REG CTRLR BUCK 16SOIC
CL10B224KO8SFNC
Samsung Electro-Mechanics
CAP CER 0.22UF 16V X7R 0603
F1827HD600
Sensata-Crydom
MODULE SCR/DIODE 25A 240VAC
ICL3223ECA-T
Renesas Electronics America Inc
IC TRANSCEIVER FULL 2/2 20SSOP
TPS62800YKAR
Texas Instruments
IC REG BUCK ADJ/FIX 1A 6DSBGA
ITS4200SMENHUMA1
Infineon Technologies
IC PWR SWTCH N-CHAN 1:1 SOT223-4 -
MC1032P
Motorola
LOGIC CIRCUIT, ECL
UC2843AQDR
Texas Instruments
IC REG CTRLR MULT TOP 14SOIC
MSB22ML
Diodes Incorporated
LOW POWER BRIDGE MSB T&R 2.5K
RP110K301B-TR
Nisshinbo Micro Devices Inc.
IC REG LINEAR 3V 150MA DFN0808-4
GRM319R61A106KE19J
Murata Electronics
CAP CER 10UF 10V X5R 1206
GRM1555C2A8R7DA01J
Murata Electronics
CAP CER 8.7PF 100V C0G/NP0 0402
251R14S2R7BV4T
Johanson Technology
CAP CER 2.7PF 250V C0G/NP0 0603
LT1963EST-1.5#PBF
Analog Devices Inc.
IC REG LINEAR 1.5V 1.5A SOT223-3
TPS51225RUKT
Texas Instruments
IC REG QUAD BUCK/LNR SYNC 20WQFN
MCP23S18T-E/SO
Microchip Technology
IC XPNDR 10MHZ SPI 28SOIC
SY100ELT21LZC
Microchip Technology
IC TRANSLTR UNIDIRECTIONAL 8SOIC
MP8007GV-Z
Monolithic Power Systems Inc.
IC POE CNTRL 802.3AF 28QFN
STM6718TWWY6F
STMicroelectronics
IC SUPERVISOR 2 CHANNEL SOT23-5
F930J227KCC
KYOCERA AVX
CAP TANT 220UF 10% 6.3V 2312
PSMN016-100YS,115
Nexperia USA Inc.
MOSFET N-CH 100V 51A LFPAK56
AD8051AR-REEL
Analog Devices Inc.
IC OPAMP VF R-R LDIST LP 8SOIC
DRV8876NPWPR
Texas Instruments
IC MOTOR DRIVER DC 5.5V 16HTSSOP
SB2H100-E3/54
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 100V 2A DO204AC