درایور موتور پله TB6600HG: مشخصات ، ویژگی ها و برنامه ها
کاتالوگ
توضیحات TB6600HG

TB6600HG یک درایور موتور میکرواستپینگ سینوئیدی سینوئیدی تک تراشه PWM از نوع PWM است.این می تواند از طریق حالت های تحریک 2 فاز ، 1-2 فاز ، W1-2 فاز ، 2W1-2 فاز و 4W1-2 فاز کنترل چرخش به جلو و معکوس برسد.موتورهای پله دو قطبی 2 فاز تنها با یک سیگنال ساعت با بازده بالا و با راندمان بالا هدایت می شوند.
گزینه ها و معادل ها:
• TB6600FG
• l6258ex
مشخصات TB6600HG
• وضعیت قسمت: فعال
• بسته بندی: سینی
• بسته / مورد: HZIP-25
• سازنده: توشیبا
• جریان عملیاتی جریان: 4.2 میلی آمپر
• ولتاژ تأمین عملیاتی: 2 ولت تا 5.5 ولت
• رتبه ولتاژ بار: 8 ولت تا 42 ولت
• تعداد خروجی ها: 2 خروجی
• PD - اتلاف برق: 40 W
• سبک نصب: از طریق سوراخ
• طول بسته/عرض/ارتفاع: 29.3 میلی متر (حداکثر) /4.5mm/15.7mm
• دسته بندی محصولات: کنترل کننده ها و درایورهای موتور / حرکت / احتراق
شرایط عملیاتی TB6600HG
(TA = -30 درجه سانتیگراد تا 85 درجه سانتیگراد)
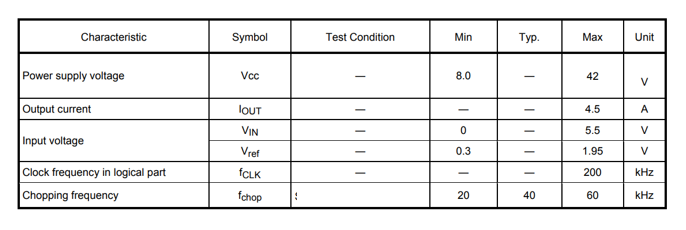
توجه: دو پایانه VCC باید همان ولتاژ برنامه ریزی شوند.حداکثر جریان دامنه عملیاتی بسته به شرایط مختلف لزوماً نمی تواند انجام شود زیرا جریان خروجی توسط PD اتلاف برق محدود است.حتماً از استفاده از IC در شرایطی که باعث می شود درجه حرارت بیش از TJ (avg.) = 107 درجه سانتیگراد باشد ، خودداری کنید.
ولتاژ منبع تغذیه 42 ولت و جریان خروجی 4.5 A حداکثر مقادیر دامنه عملیاتی است.لطفاً با در نظر گرفتن تنوع منبع تغذیه ، مقاومت خارجی و خصوصیات الکتریکی IC ، مدار را با استفاده از آن به اندازه کافی در این محدوده طراحی کنید.در صورت فراتر از ولتاژ منبع تغذیه 42 ولت و جریان خروجی 4.5 A ، IC به طور عادی کار نمی کند.
چگونه TB6600HG را به سیستم کنترل وصل کنیم؟
اتصال برق: ابتدا حتماً منبع تغذیه مناسب را به TB6600HG ارائه دهید.هنگام تغذیه TB6600HG ، معمولاً باید دو پین را وصل کنید: VCC (منبع تغذیه مثبت) و GND (سیم زمین).پین VCC وظیفه تأمین ولتاژ مورد نیاز برای رانندگی تراشه را بر عهده دارد ، در حالی که پین GND به عنوان سطح زمین مرجع عمل می کند.ما باید اطمینان حاصل کنیم که منبع تغذیه پایدار است و مشخصات TB6600HG را برآورده می کند.
اتصال سیگنال: با توجه به نیازهای خاص سیستم کنترل ، ما باید سیگنال کنترل را به پین مربوطه تراشه درایور TB6600HG وصل کنیم.این سیگنال های کنترل معمولاً شامل سیگنال های کنترل جهت و سیگنال های پالس پله و غیره هستند که وظیفه آموزش نحوه عملکرد موتور ، از جمله جهت چرخش و سرعت چرخش را بر عهده دارند.
اتصال موتور: ما باید هنگام اتصال موتور به تراشه درایور TB6600HG ، به خصوص مراقب باشیم.دو سیم موتور ، معمولاً قرمز و سیاه ، به ترتیب قطب های مثبت و منفی موتور را نشان می دهد.سیم قرمز معمولاً به ترمینال مثبت موتور متصل می شود ، در حالی که سیم سیاه به ترمینال منفی متصل می شود.
اتصال بازخورد (اختیاری): اگر از رمزگذار برای کنترل بازخورد استفاده می شود ، ما همچنین باید سیگنال خروجی رمزگذار را به سیستم کنترل وصل کنیم.این به طور معمول شامل خروجی های فاز A ، فاز B و فاز Z (در صورت موجود بودن) است.
زمینی: برای جلوگیری از تداخل و آسیب ، باید اطمینان حاصل کنیم که سیم زمین مشترک تمام تجهیزات به درستی به هم وصل شده است.
تنظیمات اولیه سازی: پس از اتمام اتصال ، ما باید تنظیمات TB6600HG را اولیه کنیم تا اطمینان حاصل شود که به درستی کار می کند.این ممکن است شامل تعیین محدودیت های فعلی ، حالت های پله ای و غیره باشد.
ویژگی های محصول TB6600HG
• یک رادیاتور بزرگ شده را برای اتلاف گرمای خوب اتخاذ کنید
• دستورالعمل های تنظیم زیر مجموعه در پشت صفحه چاپ می شوند
• با عملکرد حفاظت از مدار کوتاه خروجی ، استفاده بدون نگرانی
• اتصالات نوری با سرعت بالا 6N137 را برای اطمینان از سرعت زیاد بدون از بین رفتن هماهنگ سازی اتخاذ کنید
• جریان خروجی برای پاسخگویی به نیازهای مختلف برنامه شما کاملاً قابل تنظیم است
• با استفاده از حالت ورودی آند مشترک ، دو پایانه ورودی وجود دارد که سیم کشی راحت تر می شود
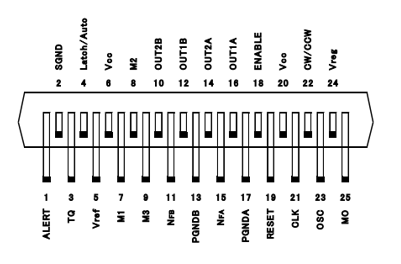
پیکربندی پین TB6600HG
توضیحات عملکرد TB6600HG
تنظیمات تحریک
حالت تحریک را می توان با استفاده از ورودی های M1 ، M2 و M3 از هشت حالت زیر انتخاب کرد.هنگامی که ورودی های M1 ، M2 یا M3 در حین کار موتور منتقل می شوند ، یک حالت تحریک جدید از حالت اولیه شروع می شود ، و به طور بالقوه تداوم شکل موج جریان خروجی را مختل می کند.
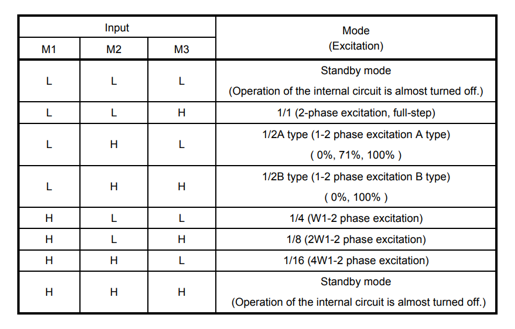
توجه: برای تغییر حالت هیجان انگیز با تغییر M1 ، M2 و M3 ، حتماً M1 = M2 = M3 = L یا M1 = M2 = M3 = H را تنظیم نکنید.
حالت آماده به کار
حالت عملیات تحت شرایط M1 = M2 = M3 = L یا M1 = M2 = M3 = H به حالت آماده به کار حرکت می کند. مصرف برق با خاموش کردن تمام عملیات به جز محافظت از عملکرد به حداقل می رسد.در حالت آماده به کار ، ترمینال خروجی MO Hz است.حالت آماده به کار با تغییر وضعیت M1 = M2 = M3 = L و M1 = M2 = M3 = H به حالت دیگر آزاد می شود.سیگنال ورودی پس از انتشار حالت آماده به کار برای حدود 200 میکرومتر پذیرفته نمی شود.
حالت پوسیدگی
شارژ و تخلیه جریان در حالت PWM به طور معمول در OSCM حدود پنج چرخه نیاز دارد.حالت پوسیدگی سریع 40 درصدی با القای پوسیدگی در دو چرخه پایانی حالت پوسیدگی سریع آغاز می شود ، با این که نسبت 40 درصد به طور مداوم ثابت مانده است.رابطه بین فرکانس ساعت اصلی (FMCLK) ، فرکانس OSCM (FOSCM) و فرکانس PWM (FCHOP) به شرح زیر نشان داده شده است:
FOSCM = 1/20 × fmclk
fChop = 1/100 × fmclk
هنگامی که ROSC = 51KΩ ، ساعت اصلی = 4MHz ، OSCM = 200kHz ، فرکانس PWM (FCHOP) = 40kHz.
حالت اولیه
هنگام استفاده مجدد ، جریان های فاز به شرح زیر است.
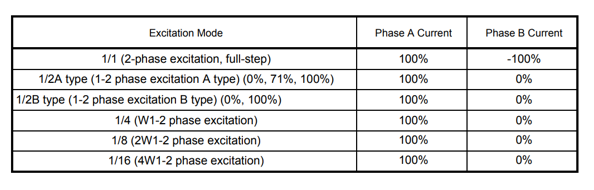
جهت فعلی به شرح زیر تعریف شده است.
Out1a → Out2a: جهت رو به جلو
Out1b → Out2B: جهت رو به جلو
استفاده از TB6600HG
ذکر شده در زیر برخی از برنامه های TB6600HG است.
• چراغ های دم
• ساختمانهای مهمان نوازی
• نمایشگر بزرگ LED در فضای باز
• جایگزین برای چراغ های HID
• چراغ های خیس صنعتی
• نور پس زمینه با فرمت بزرگ
• نورپردازی LED LED را نمایش دهید
• تلفن های هوشمند دارای دوربین
• توپولوژی های پله ای یا پله به پایین راننده
گسل ها و راه حل های مشترک TB6600HG
در زیر برخی از خطاهای متداول در مورد TB6600HG و راه حل های آنها برای کمک به شما در انجام اقدامات سریع هنگام مواجهه با گسل ها و محافظت از عملکرد عادی دستگاه ذکر شده است.
شکست یک: گرمای بیش از حد تراشه راننده
تراشه TB6600HG به خودی خود خیلی گرم است ، احتمالاً به دلیل بار بیش از حد یا شرایط اتلاف حرارت ضعیف.
راه حل: اتلاف گرما را تقویت کنید
ما باید سینک های گرما یا فن های خود را در تراشه و موتور راننده اضافه کنیم تا اطمینان حاصل شود که آنها می توانند هنگام کار به طور کامل گرما را از بین ببرند.در عین حال ، ما باید محیط را در اطراف تراشه راننده و موتور به خوبی تهویه نگه داریم تا از گرمای بیش از حد جلوگیری شود.
خرابی دو: موتور در جهت اشتباه می چرخد
پس از دریافت موتور سیگنال درایو ، جهت چرخش مطابق با مورد انتظار نیست ، ممکن است سیگنال کنترل اشتباه باشد یا تراشه درایو به درستی پیکربندی نشده باشد.
راه حل: سیگنال کنترل را بررسی کنید
برای اطمینان از صحت سیگنال کنترل جهت و سیگنال پالس ، باید سیگنال های کنترل ارسال شده به TB6600HG را با دقت بررسی کنیم.اگر از میکروکنترلر برای ارسال سیگنال ها استفاده می شود ، لطفاً کد برنامه و پیکربندی PIN را بررسی کنید.
شکست سه: موتور نتواند چرخش کند
موتور پس از دریافت سیگنال درایو پاسخ نمی دهد ، ممکن است تراشه راننده به درستی کار نکند یا مشکلی در اتصال بین موتور و تراشه راننده وجود دارد.
راه حل: منبع تغذیه و اتصال را بررسی کنید
ما باید اطمینان حاصل کنیم که منبع تغذیه TB6600HG طبیعی است و اتصال بین موتور و تراشه راننده جامد است.ما با استفاده از مولتی متر ولتاژ و جریان موجود در مدار را بررسی می کنیم تا مطمئن شویم که آنها در محدوده طبیعی هستند.
شکست چهار: گرمایش جدی موتور
این موتور در حین کار گرمای بیش از حد ایجاد می کند که ممکن است در اثر اتلاف بیش از حد جریان یا ضعیف گرما ایجاد شود.
راه حل: تنظیمات فعلی را تنظیم کنید
اگر موتور گرمای جدی ایجاد کند ، می توانیم سعی کنیم جریان خروجی تراشه راننده را کاهش دهیم.با تنظیم پین تنظیم فعلی TB6600HG ، می توانیم به طور موثری اندازه جریان خروجی را محدود کنیم ، که به نوبه خود بار موتور را کاهش می دهد و عملکرد پایدار و ایمن موتور را تضمین می کند.
سوالات متداول [سؤالات متداول]
1. دامنه دمای عملیاتی TB6600HG چیست؟
دمای کار TB6600HG از -30 درجه سانتیگراد تا 85 درجه سانتیگراد متغیر است.
2. TB6600HG چیست؟
TB6600HG نوعی درایور موتور پله ای است که برای کنترل موتورهای پله ای در برنامه های مختلف مانند دستگاه های CNC ، چاپگرهای سه بعدی ، روباتیک و سیستم های اتوماسیون طراحی شده است.
3. ویژگی های اصلی TB6600HG چیست؟
ویژگی های TB6600HG شامل جریان موتور قابل تنظیم ، تنظیمات رزولوشن مرحله ، محافظت بیش از حد داخلی و ورودی های جدا شده Opto برای کنترل سیگنال است.